Introduction
.
The Traveling Salesman Problem (TSP) is a classic problem in computer science and mathematics. The goal is to find the shortest possible route that allows a salesman to visit each city exactly once and return to the starting city.
.
It’s a problem that can be solved using different methods, and one effective approach is the Branch and Bound algorithm.
The TSP can be solved using various methods
- Brute Force – Check all possible routes and choose the shortest one. This method guarantees the optimal solution but is impractical for large datasets due to its high computational cost.
- Greedy Algorithms – Heuristics that make local optimal choices at each step to find a global optimum. It is also called Nearest Neighbour Problem.
- Dynamic Programming – Optimizes the problem by solving subproblems and combining their solutions. It is also called Held-Karp algorithm.
- Branch & Bound Approach – breaking the problem into smaller subproblems (branching) and calculating a lower bound for each subproblem. If the lower bound exceeds the current best solution, that branch is pruned (ignored).
- Approximation Algorithms – Provides near-optimal solutions in a reasonable time, useful for large instances. It is also called Christofides Algorithm.
We first solve the Travelling Salesman Problem by Greedy algorithm, then solve by Dynamic Programming and now we are solving it by Branch & Bound algorithm.
.
Problem Statement
You are given a set of n cities and a distance matrix that represents the cost of traveling between each pair of cities. The goal is to find the shortest possible route that visits each city exactly once and returns to the starting city. This is known as the Traveling Salesman Problem (TSP).
Using the Branch and Bound approach, your task is to find the optimal solution (shortest route) for the TSP.
The algorithm should
- Explore all possible routes but efficiently eliminate paths that cannot lead to the optimal solution (using bounds).
- Return the shortest route along with the total cost of that route.
.
History
Branch and Bound was introduced as an exact method to solve TSP in the 1960s. The method was proposed by A. H. Land and A. G. Doig in 1960 to solve integer programming problems, but its powerful ability to reduce the search space made it applicable to other combinatorial problems, including TSP.
In 1980s-1990s, improved bounding techniques and computational power allow for larger TSP instances to be solved using Branch and Bound.
In 2000s-Present, Branch and Bound continues to be used alongside other algorithms, and new hybrid approaches are developed for solving modern variations of TSP, like mapping DNA sequence and protein folding.
.
TSPAlgorithm
- Initialize
- Start from an initial node (let’s call it start).
- Calculate the lower bound (LB) by summing the two smallest outgoing edge costs from the starting node, and divide this sum by 2.
- Create Branches
- At the 0th level, create branches to each of the remaining unvisited nodes.
- For each branch, calculate the lower bound (LB) by updating the cost and sum of outgoing edges from the new node.
- Prune the branches where the lower bound exceeds the minimum lower bound so far.
- Explore Next Level
- From the current node with the smallest lower bound, create new branches to the unvisited nodes.
- For each new branch, recalculate the lower bound considering the added cost of visiting that node.
- Continue to prune paths where the lower bound is higher than the smallest found so far.
- Repeat Branching
- Keep expanding branches from the current node to the next unvisited nodes, recalculating the lower bounds at each step.
- Prune all branches where the lower bound exceeds the minimum lower bound.
- Complete the Tour
- Continue expanding until all nodes have been visited. Once the last node is visited, return to the start node to complete the cycle.
- Calculate the total cost of the tour and compare it to the lowest lower bound found in previous branches.
- Solution
- The final solution will be the path that visits all nodes exactly once and returns to the start node, with the minimum total cost.
Example
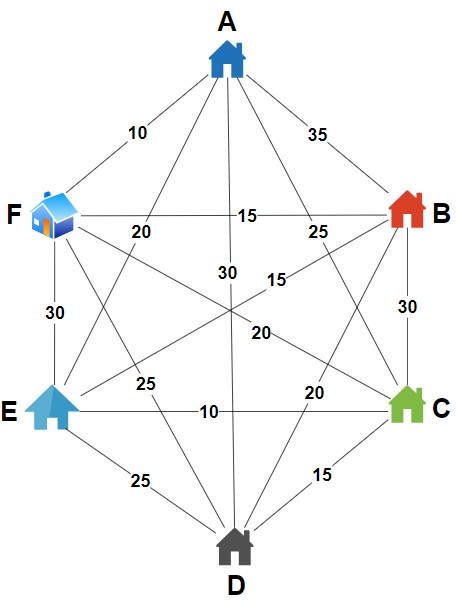
Example Distance Matrix

Compute Lower bound
Lower bound = (Sum of two smallest distance edges) / 2
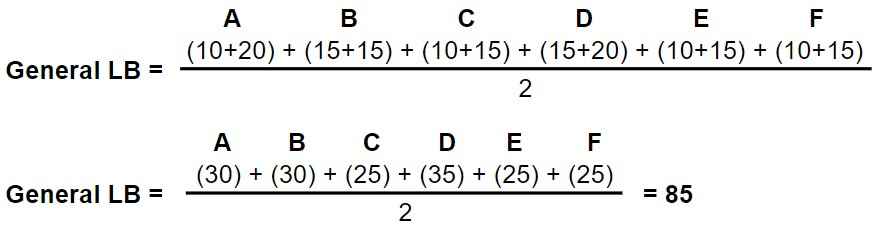
Step 1 – You have to compute General lower bound.
.
So, its general lower bound is 85, means if you work upon any algorithm and by any method, the cost is not less than general lower bound. It will be equal to or greater than 85.

.
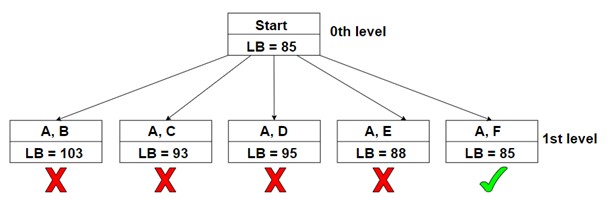
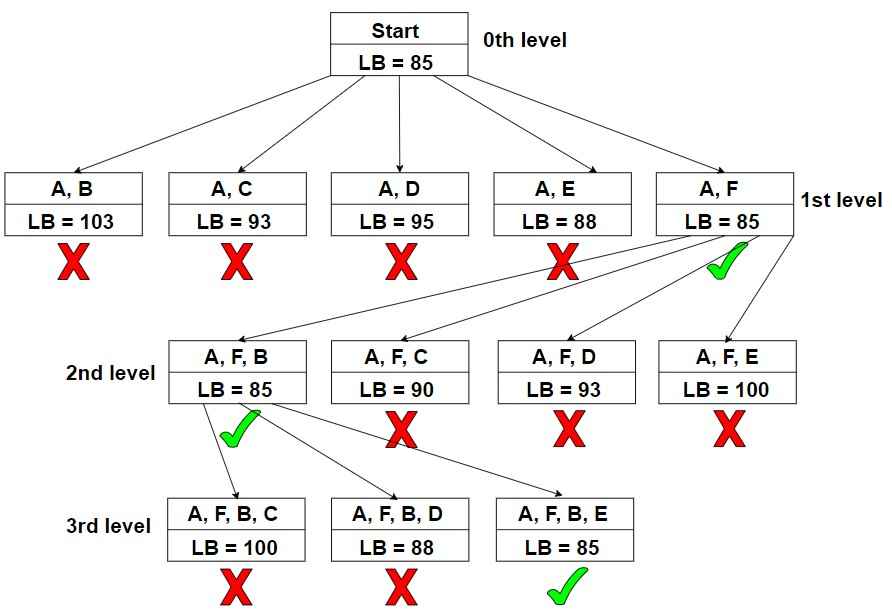
Step 2 – Compute Lower Bound from city A
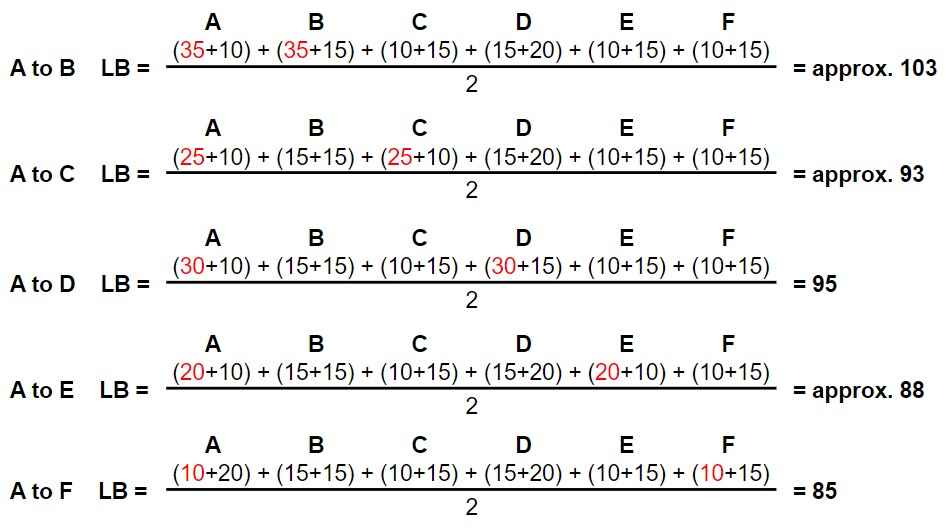
We have created paths from city A to all the other cities, and the lowest cost was from city A to city F. Therefore, we will travel from A to F because its lower bound is 85. The other cities have a higher lower bound, so we will not choose them. We have pruned those paths using the branch and bound method.
.
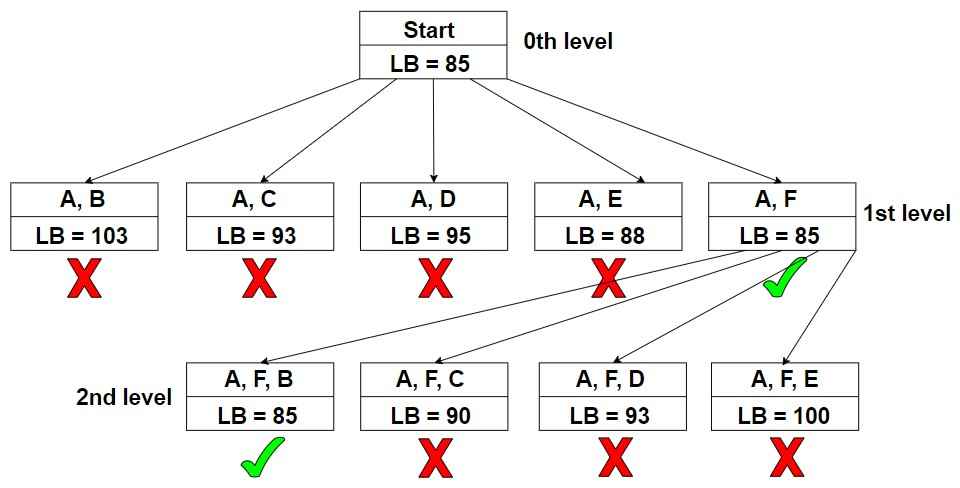
Step 3 – Compute Lower Bound from city F
From city A to city F, you have to use 10 costs, as given in the graph and is denoted with red colour. Also, the computation involved is in blue colour.
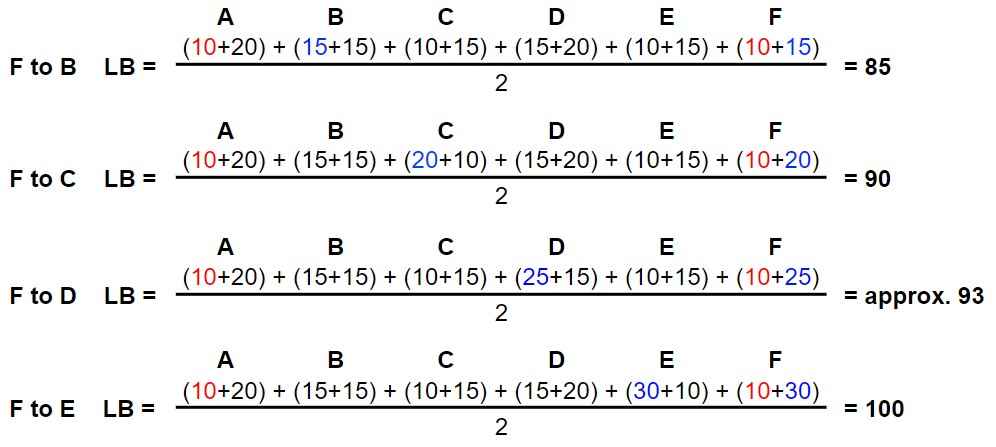
We have created paths from city F to all the other cities, and the lowest cost was from city F to city B. Therefore, we will travel from F to B because its lower bound is 85. The other cities have a higher lower bound, so we will not choose them. We have pruned those paths using the branch and bound method.
.
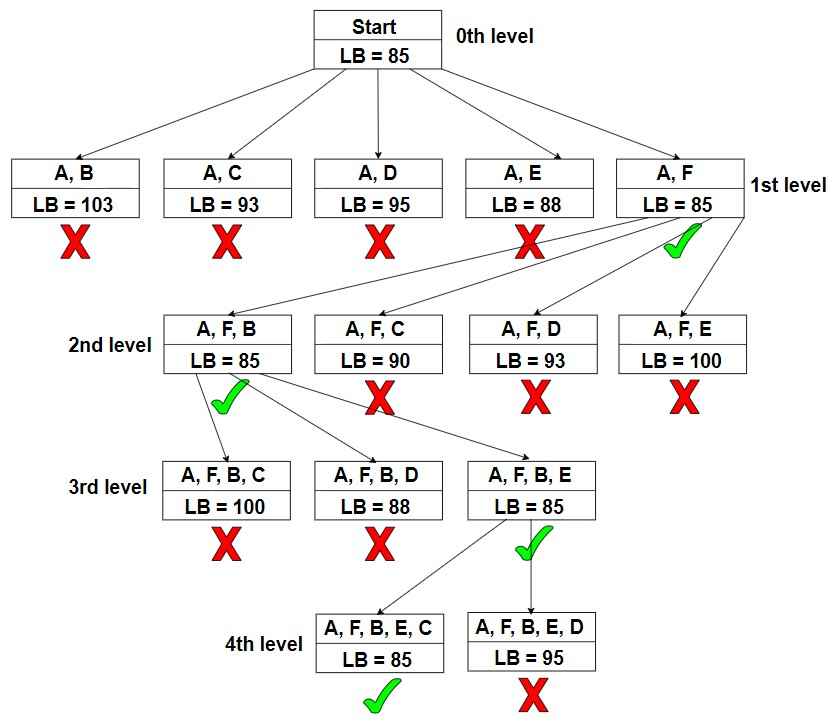
Step 4 – Compute Lower Bound from city B
From city A to city F and city F to city B, you have to use 10 + 15 = 25 cost, as given in the graph and is denoted with red colour. Also, the computation involved is in blue colour.
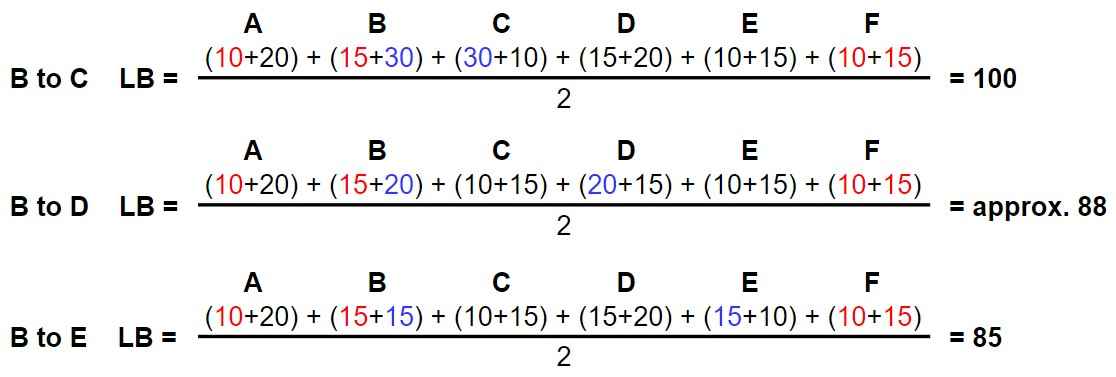
We have created paths from city B to all the other cities, and the lowest cost was from city B to city E. Therefore, we will travel from B to E because its lower bound is 85. The other cities have a higher lower bound, so we will not choose them. We have pruned those paths using the branch and bound method.
.
Step 5 – Compute Lower Bound from city E
From city A to city F, city F to city B, and city B to city E, you have to use 25 + 15 = 40 cost, as given in the graph and is denoted with red colour. Also, the computation involved is in blue colour.
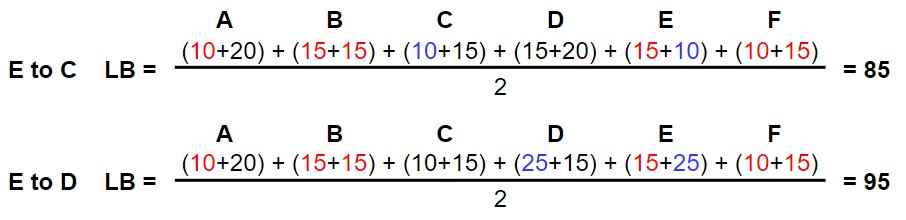
We have created paths from city E to all the other cities, and the lowest cost was from city E to city C. Therefore, we will travel from E to C because its lower bound is 85. The other cities have a higher lower bound, so we will not choose them. We have pruned those paths using the branch and bound method.
.
Step 6 – There is only one city left, that is, city D. The cost require from city C to city D is 15. There is only one lower bound, so no pruning is there.

Also, from city D to city A, the lower bound or cost is 30.

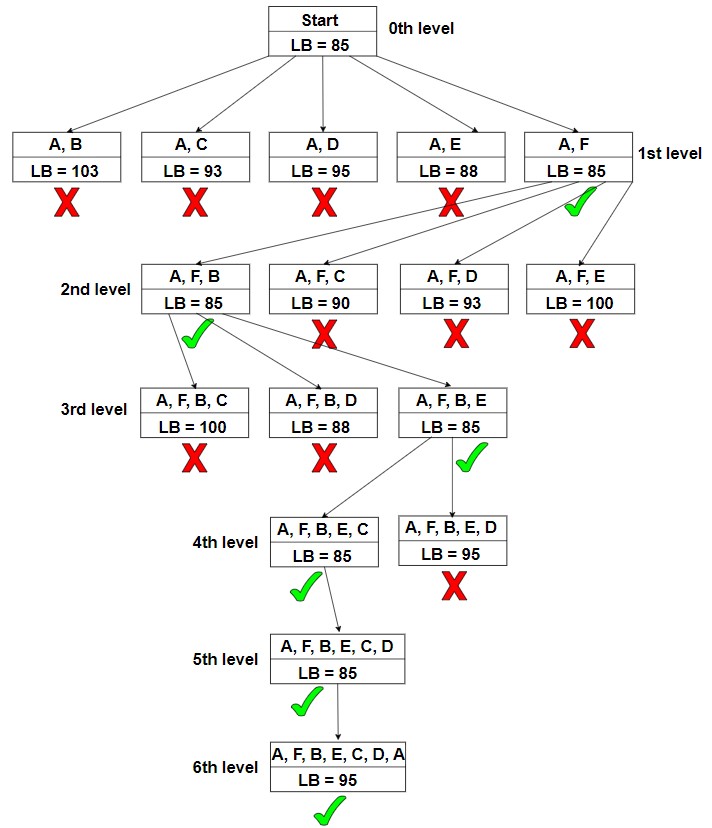
Therefore, path is A -> F -> B -> E -> C -> D -> A, and the lower bound or the total cost is 95.
.
Source Code for TSP using Branch & Bound
BOOKS