Introduction
.
The Held-Karp Algorithm or Traveling Salesman Problem (TSP) by Dynamic programming is a classic algorithmic problem in computer science and operations research.
The goal is simple – Given a list of cities and the distances between them, find the shortest possible route that visits each city exactly once and returns to the starting point.
This problem is crucial in fields like logistics, transportation, and manufacturing.
The TSP can be solved using various methods
- Brute Force – Check all possible routes and choose the shortest one. This method guarantees the optimal solution but is impractical for large datasets due to its high computational cost.
- Greedy Algorithms – Heuristics that make local optimal choices at each step to find a global optimum. It is also called Nearest Neighbour Problem.
- Dynamic Programming – Optimizes the problem by solving subproblems and combining their solutions. It is also called Held-Karp algorithm.
- Branch & Bound Approach – breaking the problem into smaller subproblems (branching) and calculating a lower bound for each subproblem. If the lower bound exceeds the current best solution, that branch is pruned (ignored).
- Approximation Algorithms – Provides near-optimal solutions in a reasonable time, useful for large instances. It is also called Christofides Algorithm.
We solve this problem by Greedy method and now we will solve the Travelling Salesman Problem by Dynamic Programming, and It is also called Held-Karp algorithm.
.
Held-Karp Algorithm
The Held-Karp algorithm, also known as the Dynamic Programming Solution for the Traveling Salesman Problem (TSP), is an exact algorithm that solves the TSP. It is named after Michael Held and Richard M. Karp, who introduced this approach in 1962.
Held-Karp algorithm is often referred to as the “Bellman-Held-Karp algorithm,” named after Richard Bellman, who developed the dynamic programming approach. Held and Karp adapted Bellman’s dynamic programming approach to efficiently solve the TSP, which led to the algorithm now known as the Bellman-Held-Karp algorithm.
.
Problem Statement
Given a set of n cities and a distance matrix that represents the distances between every pair of cities, the goal is to find the shortest possible route that:
- Starts at a specified city (or any city, since the problem is symmetric).
- Visits each city exactly once.
- Returns to the starting city.
.
AlgorithmforHeldKarp
Understanding the Problem
- Imagine you have several cities and you want to find the shortest path that starts from one city, visits all other cities exactly once, and returns to the starting city.
Using Dynamic Programming
- Instead of checking every possible route, which would be too slow, the Held-Karp algorithm breaks down the problem into smaller subproblems. It keeps track of the shortest paths to various subsets of cities and builds up to the solution.
State Representation
- Define a state using two pieces of information:
- Subset of Cities: A set of cities that have been visited so far.
- Last City: The last city visited in this subset.
Dynamic Programming Table
- Create a table (or use an array) where each entry dp[mask][i] represents the shortest path cost to visit all cities in the subset mask and end at city i. Here, mask is a bitmask representing which cities have been visited.
Initial State
- Start with the initial city (often city 0) and initialize the table to reflect the cost of starting and ending at this city without visiting any others.
Transition Between States
- To fill in the table, consider moving from one city to another. For each city i in a subset, compute the shortest path to each other city j not yet visited. Update the table with the minimum cost found.
Final Path Calculation
- Once the table is fully populated, find the shortest route that visits all cities and returns to the starting city by examining the last entries in the table and adding the return cost to the starting city.
.
Example
.
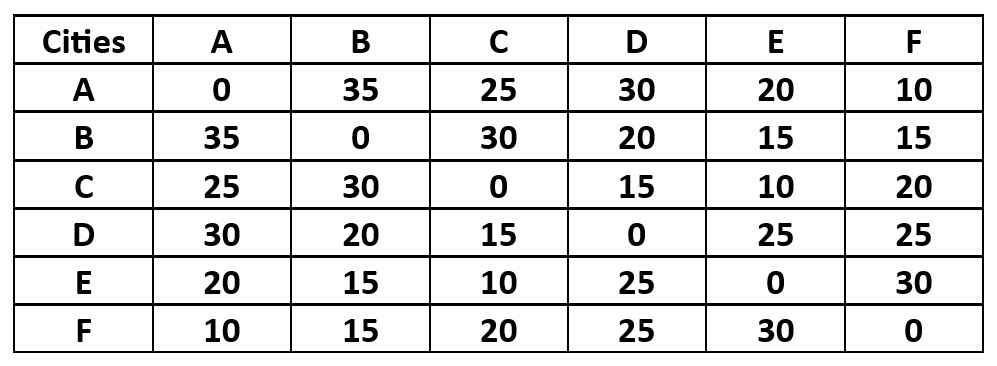
Example Distance Matrix
.
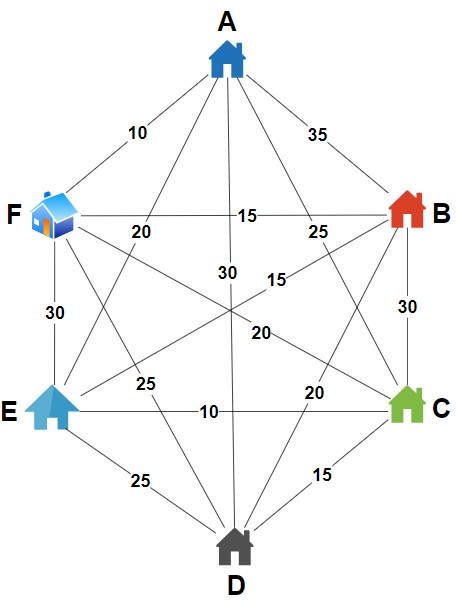
Find a tour that visits each city exactly once and returns to the starting city by always moving to the nearest unvisited city.
.
Step 1 – Calculate the Minimum Cost Between Pairs of Cities
We begin by determining the direct travel costs between every pair of cities. These initial pairwise costs will be used as the base cases for our dynamic programming table.
- Cost from City A to City B (AB) is 35
- Cost from City A to City C (AC) is 25
- Cost from City A to City D (AD) is 30
- Cost from City A to City E (AE) is 20
- Cost from City A to City B (AF) is 10
- Cost from City B to City C (BC) is 30
- Cost from City B to City D (BD) is 20
- Cost from City B to City E (BE) is 15
- Cost from City B to City F (BF) is 15
- Cost from City C to City D (CD) is 15
- Cost from City C to City E (CE) is 10
- Cost from City C to City F (CF) is 20
- Cost from City D to City E (DE) is 25
- Cost from City D to City F (DF) is 25
- Cost from City E to City F (EF) is 30
There are 15 pairs of cities with costs ranging from 10 to 35. However, we do not find the minimum cost by simply choosing the smallest value among these pairs.
For example, if we pick the pair CE with a cost of 10, the remaining cities might require covering much larger distances, leading to a higher total cost. So, choosing just the smallest pair will not give us the optimal route that covers all cities at the lowest possible cost.
.
Then, what is the SOLUTION?
To find the optimal route, we don’t just stop at selecting the minimum cost between two cities. Instead, we must consider adding a third city to each of these pairs. This allows us to explore different routes and check how the total cost changes when we visit an additional city.
.
Step 2 –
1. Cost from City AB to third City.
- Cost from City AB to City C ((AB)C) is 35+30 = 65
- Cost from City AB to City D ((AB)D) is 35+20 = 55
- Cost from City AB to City E ((AB)E) is 35+15 = 50
- Cost from City AB to City F ((AB)F) is 35+15 = 50
.
2. Cost from City AC to third City.
- Cost from City AC to City B ((AC)B) is 25+30 = 50
- Cost from City AC to City D ((AC)D) is 25+15 = 40
- Cost from City AC to City E ((AC)E) is 25+10 = 35
- Cost from City AC to City F ((AC)F) is 25+20 = 45
.
3. Cost from City AD to third City.
…
…
…
15. Cost from City EF to third City.
- Cost from City EF to City A ((EF)A) is 30+10 = 40
- Cost from City EF to City B ((EF)B) is 30+15 = 45
- Cost from City EF to City C ((EF)C) is 30+20 = 50
- Cost from City EF to City D ((EF)D) is 30+25 = 55
In this step, when we add a third city to each pair, we end up calculating the cost 15*4 = 60 times.
When we add a fourth city, the number of calculations increases to 60*3 = 180 times.
Adding a fifth city leads to 180*2 = 360 calculations, and after that, we just need to add the sixth city and return to the starting city.
This process is very long and complex, which is why we typically solve it using a programming language.
In other dynamic programming problems, like matrix chain multiplication or subset sum, the DP table is relatively small. However, in the Traveling Salesman Problem, the table grows large very quickly, making manual calculations impractical. That’s why we rely on a programming language to compute the answer efficiently.
.
Using the programming language, we’ve successfully calculated the minimum cost for this 6-city example using the Held-Karp Algorithm. The total minimum cost for completing the tour is 90.
This result represents the lowest possible cost to visit all six cities exactly once and return to the starting city.
.
Source Code for Held-Karp Algorithm
BOOKS