Understanding Dijkstra’s Algorithm
Introduction
Dijkstra’s algorithm is a fundamental concept in the field of computer science, specifically in the realm of algorithm design and analysis.
It is named after the Dutch computer scientist Edsger W. Dijkstra, who introduced it in 1956 and three years later published.
This algorithm is widely used for finding the shortest path between nodes in a graph, especially in scenarios where the graph contains non-negative weights on its edges.
.
How It Works
Dijkstra’s algorithm works by iteratively exploring nodes in a graph, gradually building up the shortest paths from a designated source node to all other nodes.
.
History of Dijkstra’s Algorithm
When working as a programmer at the Mathematical Centre in Amsterdam in 1956, Dijkstra considered the shortest path issue in order to illustrate the capabilities of a new computer known as ARMAC.
His goal was to select both a problem and a solution (generated by a computer) that non-computer users could understand.
He created the shortest path algorithm and later implemented it for ARMAC, which used it to create a somewhat simplified transport map of 64 Dutch cities (6 bits would be sufficient to encode the city number).
Edsger W. Dijkstra independently developed an algorithm similar to Prim’s minimum spanning tree algorithm, which was initially discovered by Zernike and later rediscovered by Prim. Dijkstra’s publication of the algorithm occurred in 1959, coming two years after Prim’s and 29 years subsequent to Zernike’s discovery.
.
Algorithm of Dijkstra’s Sort
- Initialization
- Assign a source node from which the shortest paths will be calculated.
- Create a set to keep track of visited nodes.
- Initialize an array or data structure to store the shortest distances from the source to each node.
- Set the distance of the source node to 0 and all other nodes to infinity.
- Iteration
- While there are unvisited nodes
- Select the unvisited node with the smallest known distance as the current node.
- Mark the current node as visited.
- Update Distances
- For each neighbouring node of the current node that is still unvisited,
- Calculate the tentative distance from the source to the neighbouring node through the current node.
- If the tentative distance is shorter than the current known distance to that neighbouring node, update the distance.
- Repeat
- Repeat steps 2 and 3 until all nodes are visited or the destination node is reached.
- Result
- Once the algorithm completes, the array or data structure containing the shortest distances will provide the shortest path from the source node to all other nodes in the graph.
.
Example
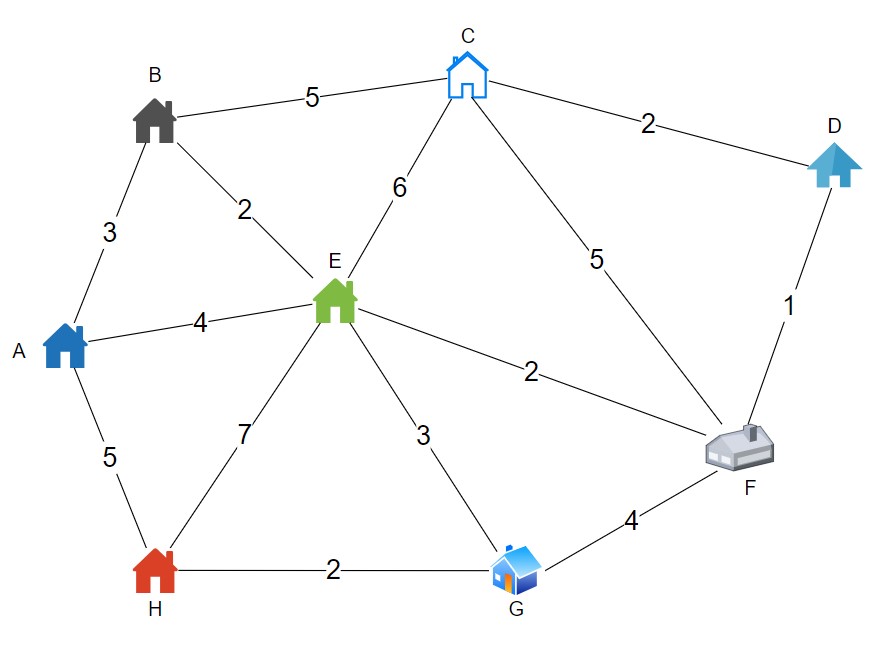
Let’s consider a road network represented as a graph where cities are the nodes and roads between cities are the edges. We’ll use Dijkstra’s algorithm to find the shortest path from a source city to a destination city.
The following graph displays the houses P, Q, R, S, T, U, V, and W as vertices, and the roads connecting them as edges. The time, expressed in hours, that the car takes to drive between each house is indicated by the numbers on the sides.
.
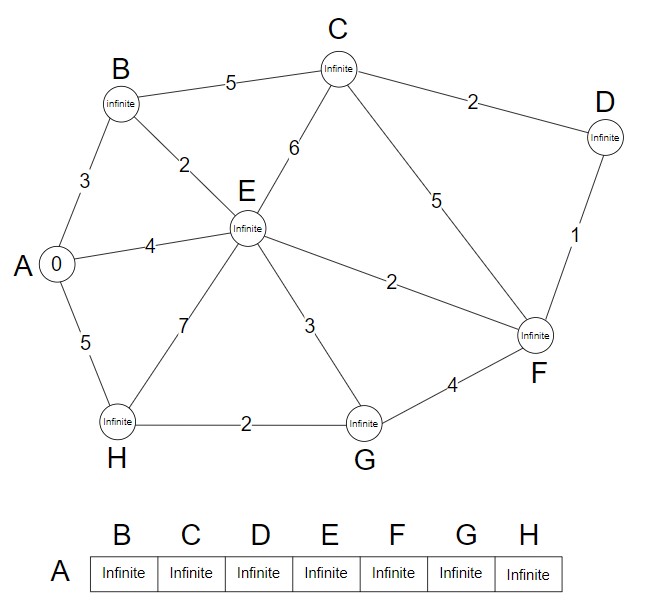
Step 1 – Start at the source node (let’s say A) with distance 0 and all other nodes to infinity.
.
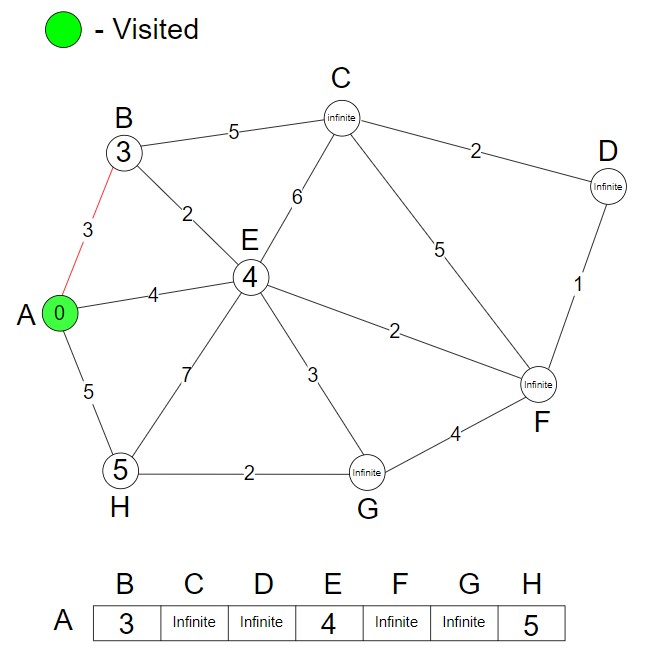
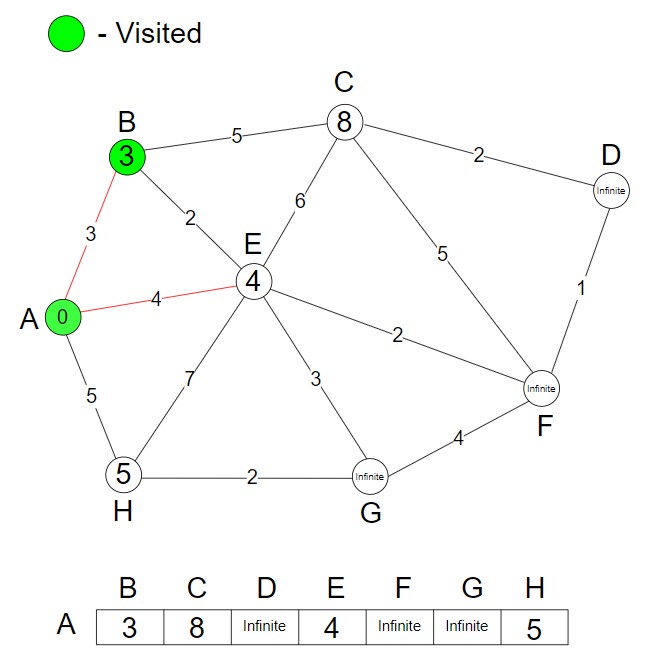
Step 2 – We mark the node A as visited.
A —> B, Cost of AB is 3, (Shortest Distance)
A —> E, Cost of AE is 4
A —> H, Cost of AH is 5
We have to find the minimum cost. So, we update the shortest distance (AB, 3).
.
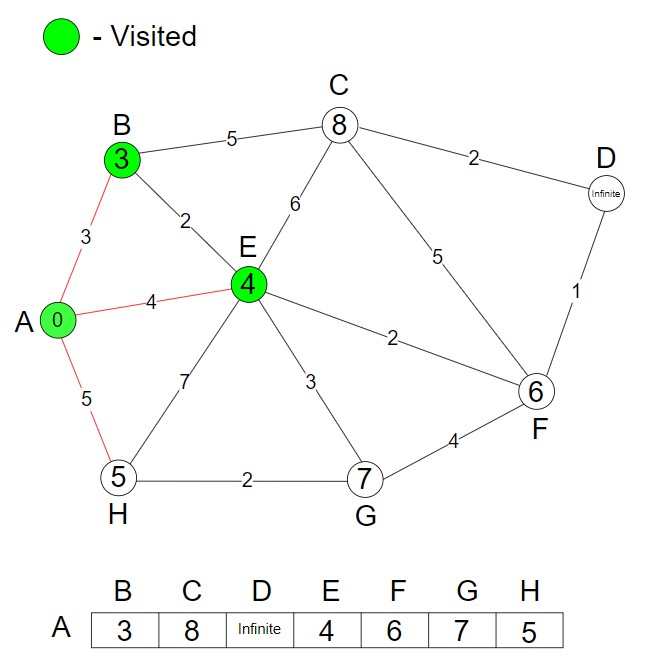
Step 3 – We mark the node B as visited.
A —> B —> C, Cost of ABC is 8
A —> B —> E, Cost of ABE is 5
A —> E, Cost of AE is 4, (Shortest Distance)
A —> H, Cost of AH is 5
We have to find the minimum cost. So, we update the shortest distance (AE, 4).
.
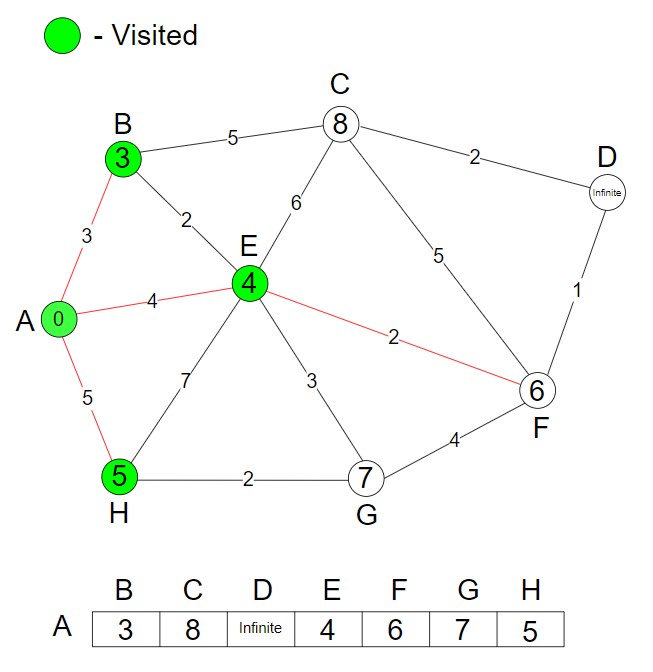
Step 4 – We mark the node E as visited.
A —> B —> C, Cost of AC is 8
A —> E —> F, Cost of AEF is 6
A —> E —> G, Cost of AEG is 7
A —> H, Cost of AH is 5, (Shortest Distance)
We have to find the minimum cost. So, we update the shortest distance (AH, 5).
.
Step 5 – We mark the node H as visited.
A —> B —> C, Cost of AC is 8
A —> E —> F, Cost of AEF is 6, (Shortest Distance)
A —> E —> G, Cost of AEG is 7
A —> H —> G, Cost of AHG is 7
We have to find the minimum cost. So, we update the shortest distance (AEF, 6).
.
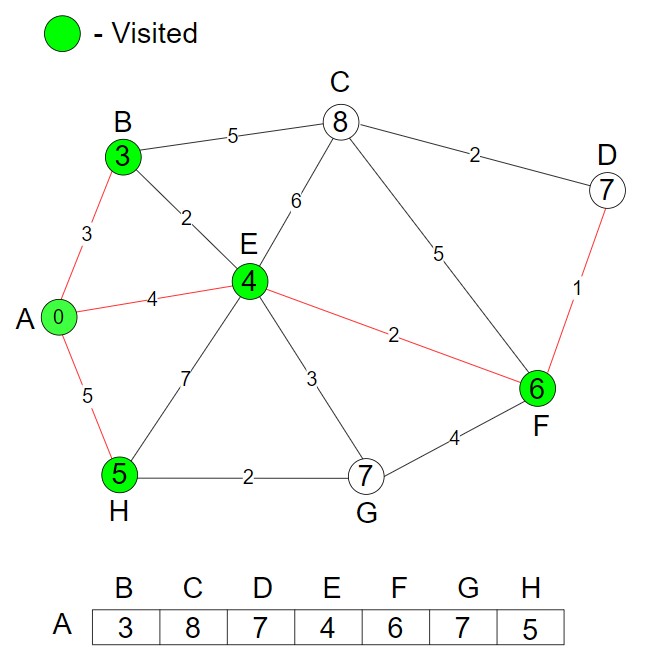
Step 6 – We mark the node F as visited.
A —> B —> C, Cost of AC is 8
A —> E —> F —> D, Cost of AEFD is 7, (Shortest Distance)
A —> E —> G, Cost of AEG is 7
A —> H —> G, Cost of AHG is 7
We have to find the minimum cost. So, we update the shortest distance (AEFD, 7).
.
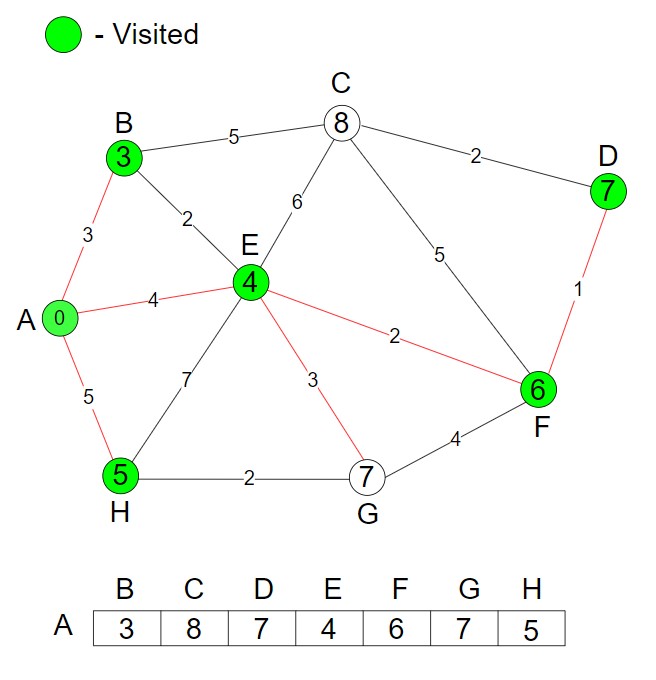
Step 7 – We mark the node D as visited.
A —> B —> C, Cost of AC is 8
A —> E —> G, Cost of AEG is 7, (Shortest Distance)
A —> H —> G, Cost of AHG is 7
We have to find the minimum cost. So, we update the shortest distance (AEG, 7).
.
Step 8 – We mark the node G as visited.
A —> B —> C, Cost of AC is 8, (Shortest Distance)
We have to find the minimum cost. So, we update the shortest distance (ABC, 8).
Also, mark the node C as visited.
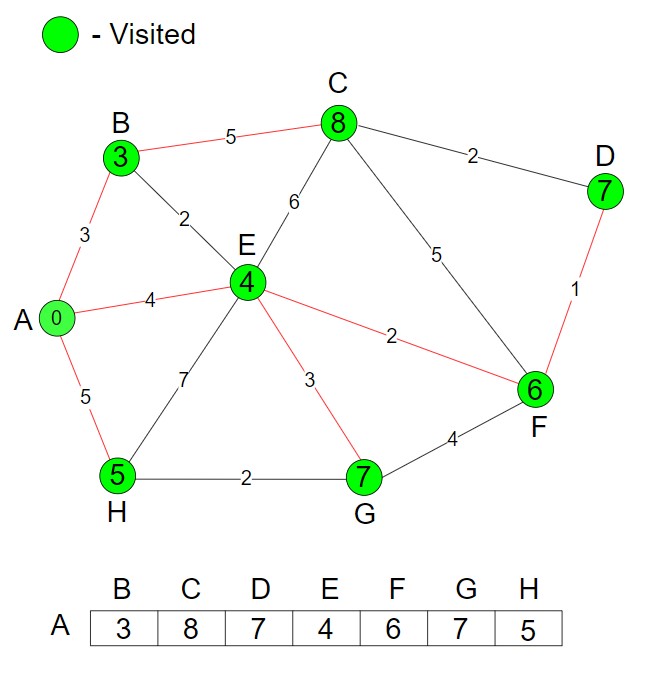
Dijkstra’s Algorithm is complete.
.
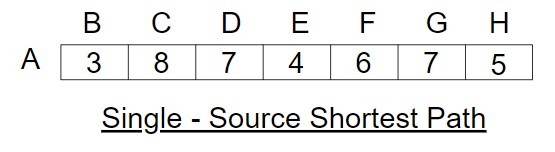
Note – I have just solved an array which has the shortest distance from source node A to the remaining vertices. This is the single source shortest path which we have come across now.
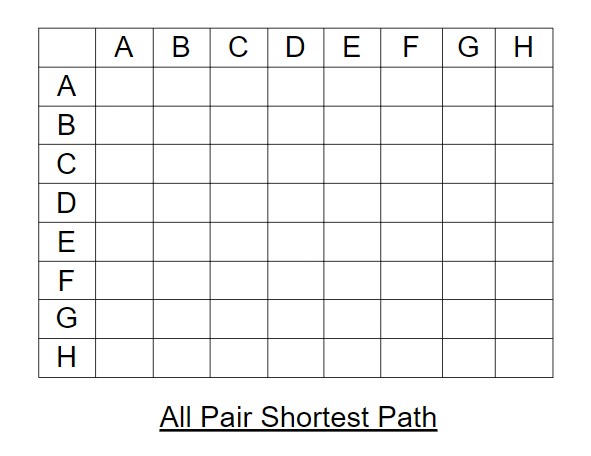
If I declare all the vertices as source nodes and find the shortest path of all the vertices then I use All pair shortest path.
.
Source Code of Dijkstra’s Algorithm
BOOKS